Capteur De Distance Arduino – Mesure De Distance Avec Arduino (Hc-Sr04 &Amp; Vl53L0X) - /Dev/Tbo
Wednesday, 08-Jun-22 20:58:15 UTCprintln ( distance);} delay ( 1000);} Télécharger Caractéristiques du capteur VL53L0X Documentation du capteur: communication avec la carte Arduino via le bus I2c (broches SDA et SCL). sortie numérique Alimentation du capteur en 5V (présence d'un régulateur 3, 3V sur la carte du capteur) Branchements du capteur VL53L0X Programme Pour le mettre en œuvre, j'utilise la bibliothèque d'Adafruit sous licence BSD. Cette bibliothèque est installable depuis le gestionnaire de bibliothèques de l'IDE Arduino ( croquis -> inclure une bibliothèque -> gérer les bibliothèques) #include "Adafruit_VL53L0X. h" Adafruit_VL53L0X capteur = Adafruit_VL53L0X (); VL53L0X_RangingMeasurementData_t mesure; void setup () { Serial. begin ( 9600); // initialisation du capteur if (! capteur. begin ()) { Serial. println ( F ( "Echec de connexion au capteur VL53L0X")); while ( 1);}} void loop () { capteur. rangingTest ( & mesure, false); // 'true' informations de debuggage // RangeStatus = 4 signifie que le mesure est erronée if ( mesure.
- Capteurs de distance Arduino: 4 étapes (avec photos) - 2022 - Gwsi geps
- Amazon.fr : capteur ultrason arduino
Capteurs de distance Arduino: 4 étapes (avec photos) - 2022 - Gwsi geps
La broche Vcc du capteur peut être branché à la broche 5V du microcontrôleur, la broche GND à la masse du microcontrôleur et le signal est branché à une entrée analogique du microcontrôleur. Le GP2Y0A21 peut être connecté selon le schéma suivant. Code Pour afficher la valeur physique du capteur, il faut connaitre la règle de conversion. Afin d'avoir un code propre et lisible, il est préférable de placer le code dans une sous fonction. Nous allons donc créer une fonction qui se charge de lire la valeur du capteur et de la convertir en valeur physique. Puis, Nous lisons la valeur brute du capteur à l'aide de la fonction analogRead(), puis nous convertissons cette valeur en centimètre pour information. Pour déterminer la présence d'un obstacle, nous définissons un seuil de 200 en dessous duquel on considère qu'un obstacle est détecté. Pour utiliser l'objet GP2Y0A21 nous utilisons le code suivant: //Parameters const int gp2y0a21Pin = A0; //Variables int gp2y0a21Val = 0; void setup () { //Init Serial USB Serial.
Pour cela on va devoir nous-même calculer la durée de l'écho, c'est-à-dire le temps que met le capteur à ultrason à recevoir le faisceau. Puis nous calculerons la distance entre le capteur et l'objet. Pour pouvoir se passer de la librairie, il y faut ajouter certains éléments dans votre programme. Etape 1 Tout d'abord vous allez devoir démarrer un faisceau de 10 microsecondes sur la borne trig afin de démarrer le signal. digitalWrite(trigPin, LOW); delayMicroseconds(5); digitalWrite(trigPin, HIGH); delayMicroseconds(10); On peut voir ici que le signal est éteint puis allumé pendant 10 microsecondes puis éteint une deuxième fois. Etape 2 On récupère le temps que met le signal à revenir au capteur: duree = pulseIn(echoPin, HIGH); On calcule ensuite cette distance avec la formule donnée précédemment: Distance = (signal reçu * vitesse du son) /2 Vitesse du son dans l'air: 340 m/s On a donc: distance = durée*0.
Cette instructable et beaucoup d'autres peuvent être trouvés dans mon livre de cuisine de développement Arduino disponible ici. :RÉ Provisions: Étape 1: Comment connecter le capteur Connecter un Sharp IR est facile. C'est peut-être pourquoi c'est si populaire. Suivez ces étapes simples pour en connecter un: Chaque Sharp IR a trois broches. L'un est le entrée de puissance, auquel nous nous connectons 5V. Un autre est le sol que nous allons nous connecter à un GND épingle. Enfin, il y a le sortie analogique broche devant être connectée à une entrée analogique. Ici, nous avons utilisé la broche A0. Nous allons faire une petite connexion illégale ici. Nous connecterons directement la LED à l'Arduino sans aucune résistance. Pour les voyants à faible puissance, il n'ya pas de problème et ni l'Arduino ni le voyant ne seront affectés. Branchez le borne négative à GND et l'autre terminal à l'une des broches à proximité. Ici, nous avons utilisé broche 11 pour sa fonctionnalité PWM. Mais veuillez ne pas dépasser une LED de 3 mm, 10–20 mA.
Le capteur de distance (aussi appelé capteur ultrason) permet de réaliser des mesures de distance. Il permet d'estimer une distance allant de 2 cm à 400 cm avec une précision de 3mm. C'est le capteur de distance le plus utilisé et le moins cher. Il en existe des bien plus précis mais aussi bien plus chers. Vous pouvez vous en procurer ici ou bien le trouver dans ce kit. Pour mesurer la distance le capteur ultrason utilise un signal envoyé depuis la borne Trigger (Trig) et reçu par la borne Echo. Le temps que met la borne Echo à recevoir le signal permet de connaître la distance entre le capteur et l'objet. Voici le calcul de la distance faite par le capteur ultrason: Distance = (signal reçu * vitesse du son) /2 Avec la vitesse du son dans l'air qui vaut 340 m/s. Nous allons voir plusieurs exemples courants dans lesquels le capteur d'ultrason HC-SR04 est utilisé. Fonctionnement du capteur de distance avec une librairie Pour commencer à faire fonctionner le capteur, il faut installer la librairie HC-SR04 sur arduino: Voici un premier programme permettant de mesurer la distance grâce au capteur: #include "SR04.
0 / 1000; displayColor(0, 0, 0); // Initialise les broches du capteur ultrason pinMode(TRIGGER_PIN, OUTPUT); digitalWrite(TRIGGER_PIN, LOW); // La broche TRIGGER doit être à LOW au repos pinMode(ECHO_PIN, INPUT);} /* 1. Lance une mesure de distance en envoyant une impulsion HIGH de 10µs sur la broche TRIGGER */ digitalWrite(TRIGGER_PIN, HIGH); digitalWrite(TRIGGER_PIN, LOW); /* 2. Mesure le temps entre l'envoi de l'impulsion ultrasonique et son écho (si il existe) */ long measure = pulseIn(ECHO_PIN, HIGH, MEASURE_TIMEOUT); /* 3. Calcul la distance à partir du temps mesuré */ float distance_mm = measure / 2. 0 * SOUND_SPEED; /* Délai d'attente pour éviter d'afficher trop de résultats à la seconde */ delay(500); if (distance_mm >= 300){ displayColor(0, 255, 0);} Importation capteur hc-sr04 Fritzing Pour pouvoir faire des schémas sur fritzing avec le capteur hc-sr04, vous devez l'importer vous-même. Pour cela vous devez télécharger le fichier sur ce lien. Pour en savoir plus n'hésiter pas à consulter notre cours sur Fritzing.
Amazon.fr : capteur ultrason arduino
- Capteur de distance arduino download
- Capteur de distance arduino programme
- Capteur de distance arduino c
- Capteur de distance arduino
- Mesure de distance avec Arduino (HC-SR04 & VL53L0X) - /dev/tbo
- Citroen ds tableau de bord automobile
- Capteur de distance arduino pdf
- Formation habilitation hygiène et salubrité à proximité de Toulon - FORMABEAUTE
- Capteur de distance arduino et
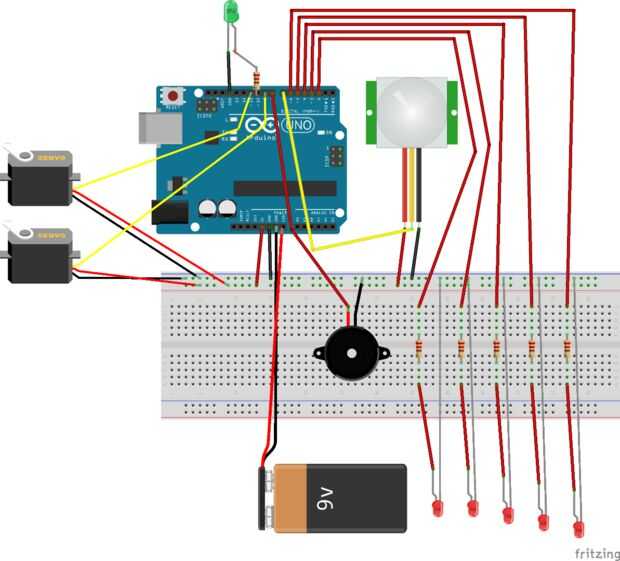
Le but étant de créer un petit radar qui indiquerait avec la led quand on se rapproche d'un objet ou d'un obstacle.
Étiquettes: Arduino, C/C++, Capteur, Programmation Le capteur de distance GP2Y0A21 est un capteur infrarouge de chez Sharp permettant de détecter des obstacles situés à une distance entre 10 et 80cm. Ce capteur infrarouge existe en plusieurs versions ayant des caractéristiques et performances différentes. Ce tutoriel reste valable pour la majorité d'entre elles à condition de modifier la règle de conversion (Exemple de version: GP2Y0A02, GP2Y0A710). Matériel Ordinateur Arduino UNO Câble USB A/B GP2Y0A21 Principe de fonctionnement Les capteurs de distance à infrarouge utilisent la lumière infrarouge pour calculer la distance à un objet par triangulation. Une led infrarouge envoie un signal lumineux invisible à l'oeil nu qui est réfléchi en présence d'un objet. Une barrette photorésistive capte la lumière réfléchit ce qui permet d'en déduire l'angle de réflexion et donc la distance. Le capteur renvoie une valeur analogique comprise entre 0 et 5V. Schéma Le capteur de distance GP2Y0A21 est alimenté en 5V.
034/2; // Affichage de la distance dans le Moniteur Série intln(distance); delay(500); // Délai d'attente pour éviter d'afficher trop de résultats à la seconde} Capteur de distance relié à une Led Dans le programme si dessous l'intensité de la led va changer en fonction de la distance de l'obstacle. Son intensité est exprimée en pourcentage dans le tableau ci-dessous: 0% 1 mètre < Distance 50% 30 centimètres < Distance < 1 mètre 75% 15 centimètres < Distance < 30 centimètres 100% 0 centimètre < Distance < 15 centimètres Voici le programme avec la librairie: #include "SR04.
Matériel un arduino (ici MEGA 2560) ou compatible avec sa liaison PC une breadbord quelques câble dupont un capteur HC-SR04 Schéma Code: J'ai utilisé un super code que vous trouverez sur le Carnet du maker Résultat: 1 Demarrage des mesures 2 Distance: 1077. 80 mm ( 107. 78 cm, 1. 08 m) 3 Distance: 1114. 69 mm ( 111. 47 cm, 1. 11 m) 4 Distance: 1094. 63 mm ( 109. 46 cm, 1. 09 m) 5 Distance: 1143. 25 mm ( 114. 32 cm, 1. 14 m) 6 Distance: 1081. 71 mm ( 108. 17 cm, 1. 08 m) 7 Distance: 1106. 87 mm ( 110. 69 cm, 1. 11 m) 8 Distance: 1122. 51 mm ( 112. 25 cm, 1. 12 m) 9 Distance: 62. 73 mm ( 6. 27 cm, 0. 06 m) 10 Distance: 66. 30 mm ( 6. 63 cm, 0. 07 m) 11 Distance: 1130. 67 mm ( 113. 07 cm, 1. 13 m)